11. Extra Challenge: PCA Boxes
Header Text
Extra Challenge: PCA Boxes
Extra Challenge: PCA Boxes
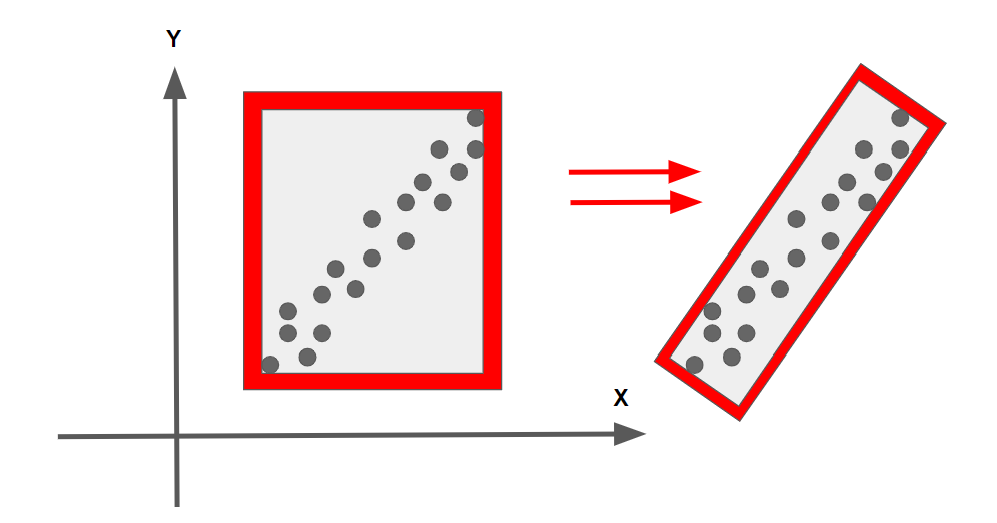
Some comments from the previous concept about the way bounding boxes are calculated. That method of generating bounding boxes the boxes are always oriented along the X and Y axis. This is ok if the cluster that you are looking at has its majority of points orientated along these axes , but what if the cluster was a very long rectangular object at a 45 degree angle to the X axis. The resulting bounding box would be a unnecessarily large, and would constrain your car's available space to move around. See the image below for reference.
PCA box
PCA fitted box
PCA Discussion
In the above image, the bounding box on the right is more efficient, containing all the points with the minimum area required. It would be nice to take into account box rotation in the XY plane, about the Z axis. Rotation about the X or Y axes would yield weird results, since the car in the majority of situations is not concerned with the Z dimension, or has any control over Z movement.
The file containing the box struct is located in
src/render/box.h
and contains an additional struct called
BoxQ
. This struct has a quaternion member that allows rotations. Also there is an additional
renderBox
function in render.cpp that takes a BoxQ argument and renders the rotational box. There is a blog post about fitting the smallest possible 3D box around a 3D point cloud
here
. The solution in the post uses
PCA
, principal component analysis and includes Z axis rotations as well. A challenge problem is then to find the smallest fitting box but which is oriented flat with the XY plane.